imtoken钱包2025官网下载:imkei.app,imkeo.app,imtoke.app,tkken.com,tokey.app,imkey.app,imtke.app,tkken.in,imtoktte.tu5223.cn tp钱包2025官网下载:tp114.app,tp115.app,tp116.app,tp117.app,tpcockktp.tu5223.cn 比特派钱包2025官网下载:bit114.app,bit115.app,btp1.app,btp2.app,btp3.app,btbtptptpie.tu5223.cn
改进人工势场法提出背景
无人机编队航迹规划常用传统人工势场法,但此方法存在不少问题。比如,无人机可能无法抵达预定目标点,甚至可能陷入局部最小值。这些问题在应用中降低了无人机编队的作业效率和精度。为此,我们设计了一种基于改进人工势场法的无人机编队航迹规划新算法。
改进人工势场法具体手段

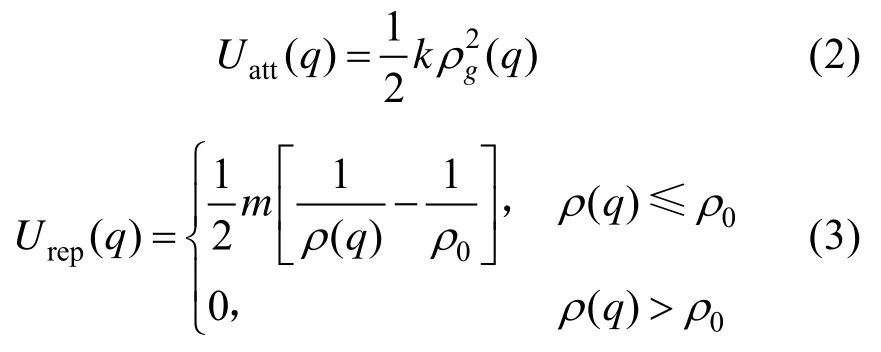
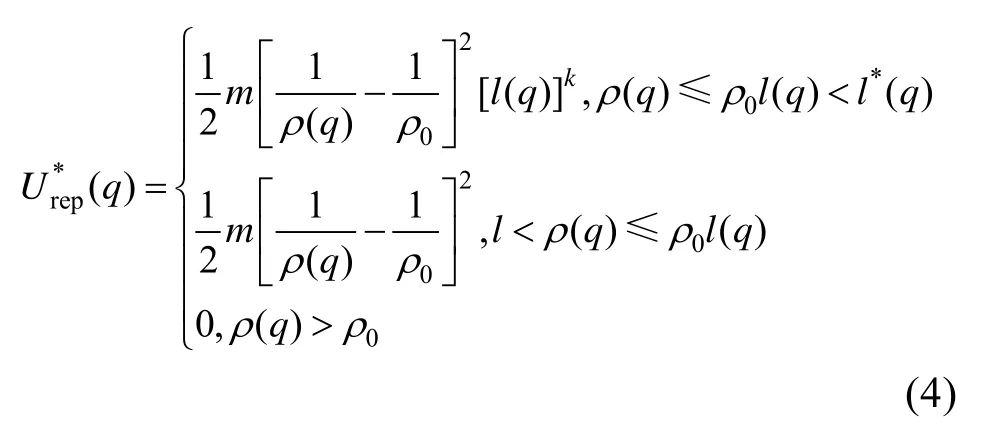
我们主要采用优化的势场函数,并引入“随机波动”策略。通过引入“随机波动”这一理念,对势场函数进行了优化,显著提升了人工势场法的运算效率。这种方法有效解决了寻找最小目标和难以到达目标的问题,增强了传统算法在航迹规划方面的速度和稳定性。
新BP神经网络辅助意义
现有的PID算法在控制精度和鲁棒性方面存在不足。面对对控制算法要求的不断提高,传统的质点模型正逐渐被更为复杂的非线性无人机数学模型所取代。鉴于此,开发一种基于BP神经网络的辅助自适应PID无人机编队智能控制算法显得尤为迫切。

新BP神经网络工作方式

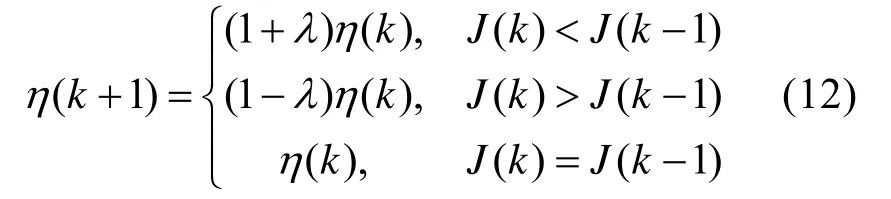
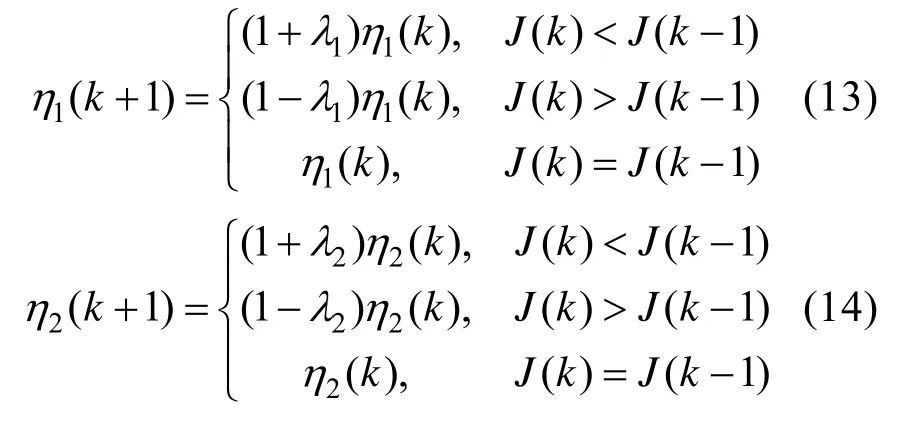
这种新模型与别的神经网络在搜索PID参数的方法上有所不同,它是在应用PID控制器的同时,借助神经网络的在线学习功能来实时调整误差。这样的方法使得PID参数得到了优化和调整,进而提升了算法的计算准确度。
传统算法模拟模型局限
过去,人们通常把无人机当作一个质点来处理,或者借助自动驾驶仪模型来模仿其反应。然而,随着控制需求的提升,这种简化的模拟方法已经不再适用。所以,它逐渐被更为复杂的非线性无人机数学模型所取代。
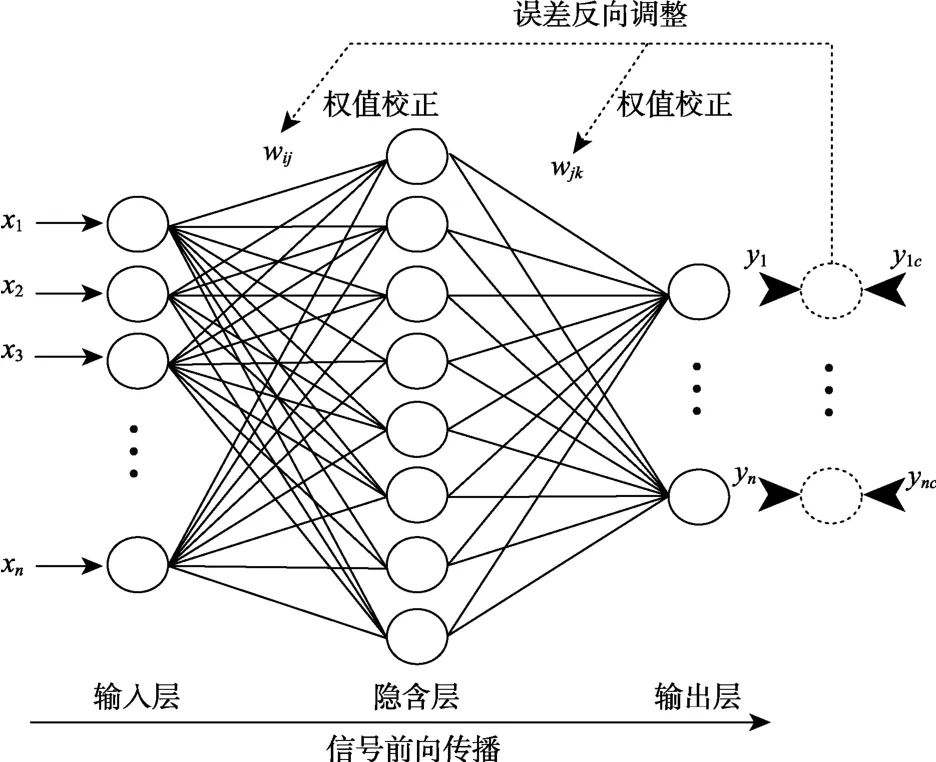
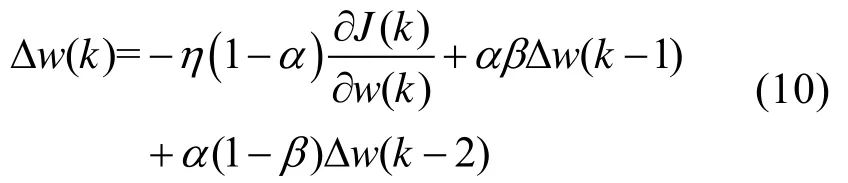
新算法结合方式优势

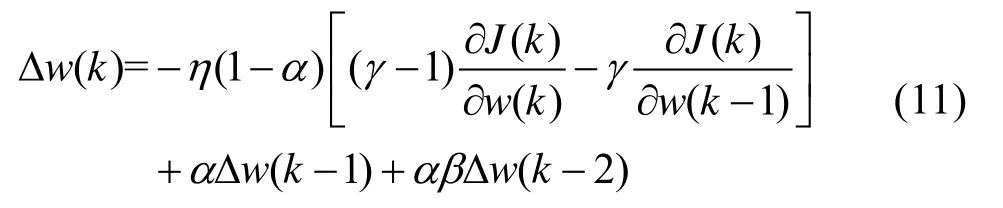
该算法将PID控制与神经网络理论融合,有效解决了现有PID算法的缺陷。通过建立新的BP神经网络PID模型,借鉴不同时间点的梯度数据,增强了网络的快速收敛能力和抗干扰性。
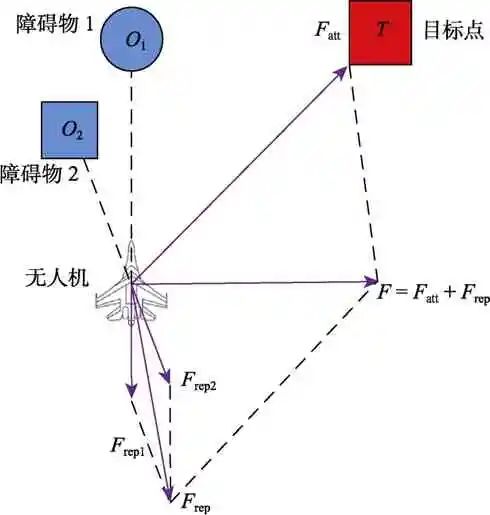
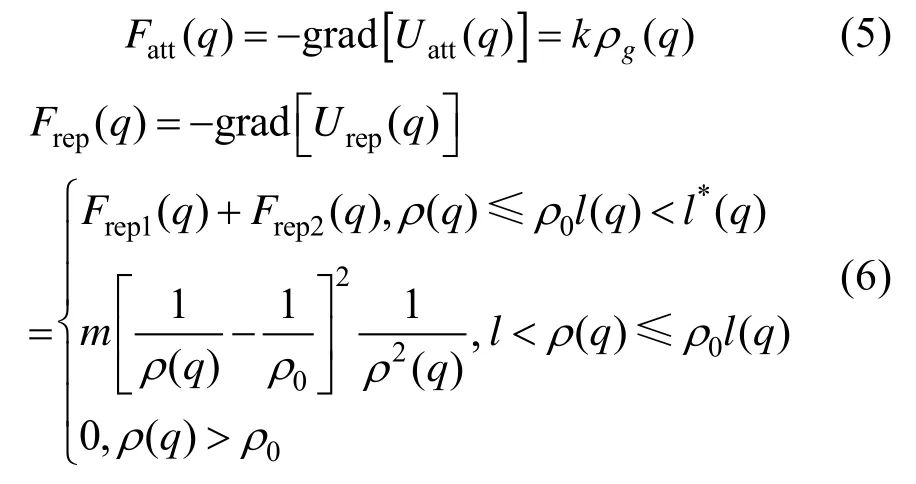
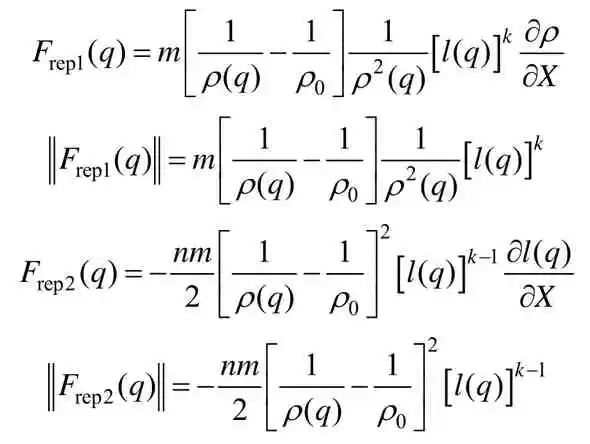
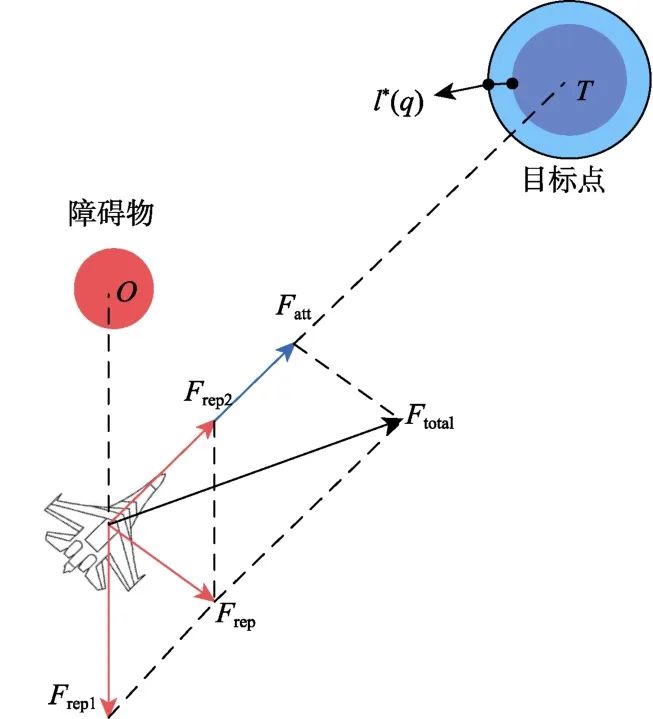
无人机改进势场受力分析
研究无人机在改进后的势场中受力状况至关重要,其中l*(q)代表对目标点距离的限定范围。掌握其受力状况有助于更准确地掌握无人机的动态,为航线规划和操控提供必要的数据依据。
控制算法计算控制值
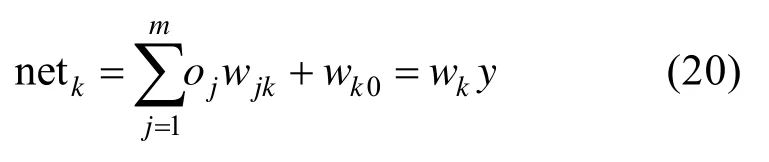
第五步,通过神经网络输出调整PID控制器的初始参数,然后根据增量型数字PID控制算法计算出神经网络PID控制器产生的控制量u(k)。这样就可以确保对无人机进行精确操控。
三通道控制律设计思路

基于传统的PID控制,我们设计了针对速度、航向角和高度的三通道神经网络自适应PID控制策略,用以调控僚机的状态。这一设计使得僚机状态调控更为周全和精确。
控制算法有效性验证

仿真数据表明,运用两种编队操控策略对僚机进行操控,均能成功追踪长机的速度、高度和航向角,这充分证明了编队控制器的实用性和高效性。这也意味着新算法在实际应用中具有显著的价值。
不同算法跟踪表现对比
在速度通道中,采用NN-PID算法可即时调整PID参数至最佳状态。相较传统方法,此算法显著减少了超调现象,确保僚机能更稳固地跟随长机的速度。
改进势场法问题解决
基于对传统人工势场法的研究,我们采用了“随机波动”技术并优化了势场函数,成功克服了局部最小值难题以及航迹规划中目标难以触及的问题,从而提高了算法的整体性能。
你认为在无人机的未来发展中,哪种算法更具备发展前景?欢迎留下你的看法,如觉得文章有价值,请记得点赞并转发!

imtoken钱包2025官网下载:imkei.app,imkeo.app,imtoke.app,tkken.com,tokey.app,imkey.app,imtke.app,tkken.in,imtoktte.tu5223.cn tp钱包2025官网下载:tp114.app,tp115.app,tp116.app,tp117.app,tpcockktp.tu5223.cn 比特派钱包2025官网下载:bit114.app,bit115.app,btp1.app,btp2.app,btp3.app,btbtptptpie.tu5223.cn